尺度不變特徵轉換(SIFT, Scale Invariant Feature Transform)是在2004年由David G. Lowe所提出,主要是用在影像特徵點萃取.其優點是所萃取 的特徵不易受到影像旋轉、縮放和灰度值差異而有所變化、具有良好特徵點選取與匹配,其匹配結果正確率較高並可消除影像處理中不確定性.目前常見的應用為全景圖的拼接:將圖片中相似特徵點的位置找出,並進行拼接,本篇文章將解釋SIFT的數學原理,並在最後我們會python將它實現在全景圖的拼接上.
SIFT演算法分成四個步驟:
- 特徵值位置偵測(使用DoF)
- 特徵點校正
- 方向指定
- 特徵描述
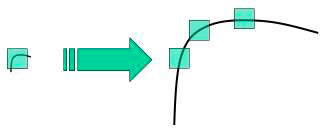
SIFT特徵萃取因為是尺度不變(Scale Invariance),所以在做特徵萃取時效果比Harris好,Harris演算法常常在圖片放大時把corner特徵辨識為edge特徵,如下圖所示:
特徵值位置偵測(使用DoF)
SIFT如何達到尺度不變?? 可以使用Laplacian of Gaussian(LoG).
Laplacian of Gaussian(LoG)的操作方法如下:
- 取一張圖,並用高斯濾鏡將它變模糊
- 計算二次微分的總和(Laplacian)
得到特徵點(corner和edge)的位置.
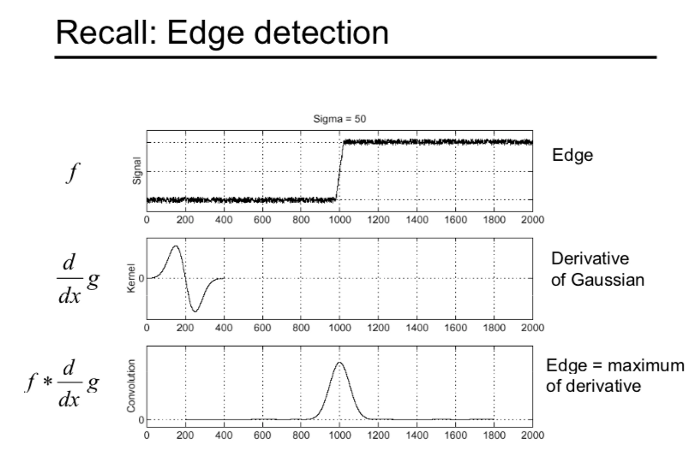

從上面兩張圖可以得知,Edge的找法有兩種:
- 高斯函數一次微分對圖片做convelution的最大值
- 高斯函數二次微分對圖片做convelution的crossing 0點
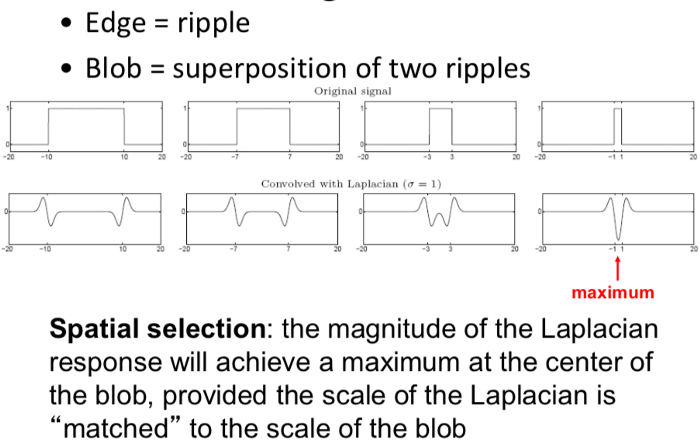
找corner的方法如上:高斯內核(Gausian kernal)二次微分對圖片做convelution的極值(最大值或最小值)為corner的位置,偵測到的corner大小與高斯內核的大小相似.因此這個方法並非“尺度不變”.
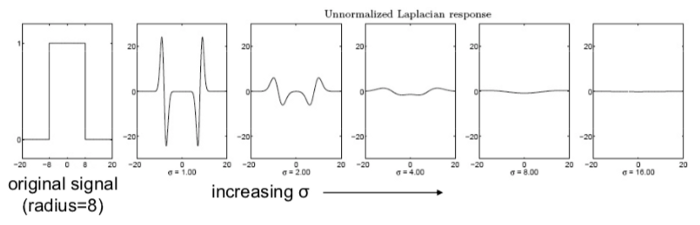
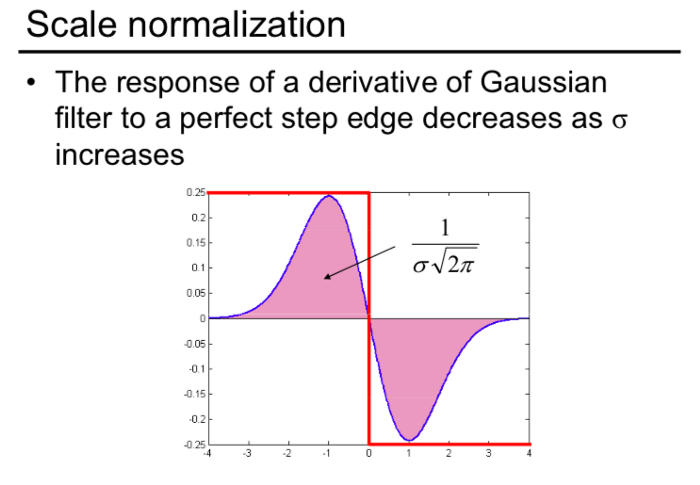
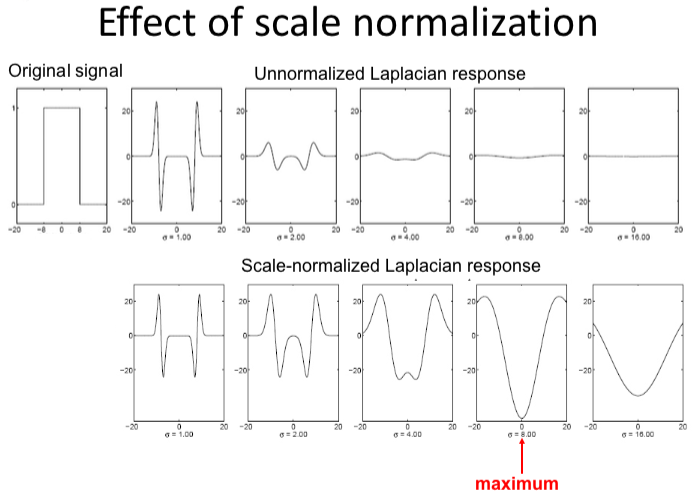
若圖片中有一個半徑為8的corner,我們用σ=1,2,4,8,16的高斯內核二次微分分別對圖片做convelution.只有σ=8的高斯內核二次微分對圖片做convelution的極值才是corner的位置.且convolution值的大小會隨著σ的增加而變小,原因如下:σ越大下圖的紅色面積越小,所以convolution的值也就會越小.為了達到“尺度不變”,我們必須對comvolution的值乘上σ平方.數學證明參考以下連結.
經過σ平方的normalization後可以找到σ=8時會有極值,而這個物質就是corner的位置.
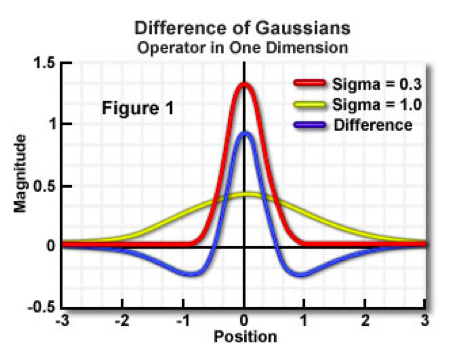
從上圖得知,實際上difference of Gausian (DoG)與Laplacian of Gausian (LoG)相似,實際上我們看可以用熱傳的方程式來證明DoF近似LoF:


左邊就是DoF;右邊就是LoF乘上σ平方.因此LoF可以用DoF取代,其運算流程如下圖所示.

特徵點校正
參考文章:N Campbell’s article
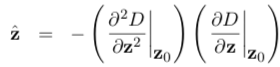
因為第一步驟的特徵點位置精確度與內核的選取數量(σ的數量)有關,因此我們要重新校正第一步驟搜尋到的特徵點位置.步驟如下:利用Taylor expansion fitting 3D quadratic surface (in x,y, and σ)找尋內差的最大或最小值.

z0是由[X,Y,σ]所組成的平面,z=[δx,δy,δσ]
把上面的式子對z做微分取零得到極值.

設定threshold,過濾掉threshold以下的特徵點位置.
方向指定
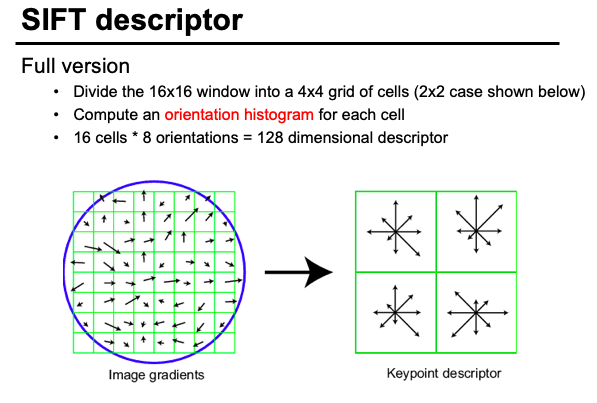
使用Histogram of Oriented Gradient (HOG)來定位.

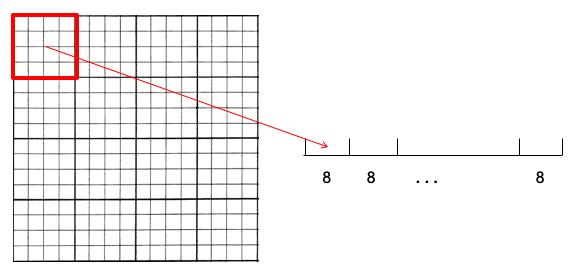
特徵描述